[성유창의 모빌리티 그랑프리] 횡성, 고난도 자율주행 테스트 베드 구상
기사입력 2023.04.25 14:59

▲박지수 한국건설생활환경시험연구원 선임이 묵계리에 구상 중인 자율주행 테스트 베드에 대해 설명하고 있다.
국내 도로 70%가 산길…입체도로 자율주행 테스트 必
자율주행 시험·평가 시나리오 도출 및 평가 지원
2027년 레벨4 자율주행 상용화를 위해서는 국내 도로 환경에 맞춘 급격한 경사 등 입체적인 도로에서의 자율주행 테스트 베드가 필요하며, 이를 횡성에 구축하는 것을 구상하고 있다는 소식이 전해졌다.
박지수 한국건설생활환경시험연구원(이하 KCL) 선임은 지난 20일 한국ITS학회 춘계학술대회에서 횡성 묵계리에 고난도 자율주행 테스트 베드 구축도 구상 중에 있다고 전했다.
고난도 자율주행 테스트 베드가 추진된다면 자율주행 차량이 고난도 구간 주행 시 안전성을 검증하고 시험할 수 있는 기반이 구축되어 보다 더 안전한 자율주행 시대를 앞당길 수 있을 것이라 기대된다.
박지수 한국건설생활환경시험연구원(이하 KCL) 선임은 지난 20일 한국ITS학회 춘계학술대회에서 횡성 묵계리에 고난도 자율주행 테스트 베드 구축도 구상 중에 있다고 전했다.
고난도 자율주행 테스트 베드가 추진된다면 자율주행 차량이 고난도 구간 주행 시 안전성을 검증하고 시험할 수 있는 기반이 구축되어 보다 더 안전한 자율주행 시대를 앞당길 수 있을 것이라 기대된다.
박 선임은 자율주행차의 안전 불안요소에 대한 안전성과 가혹한 환경에서의 주행 안전성 평가 방안이 필요하다는 것이 배경이 되어 고난도 자율주행에 대한 테스트 베드 실증 단지를 추진하게 되었다고 전했다.
현재 자율주행 기술은 커브길과 경사로에서의 객체 인식, 비포장도로에서 포장도로로 바뀌는 도로조건 등에서 제대로 제어가 가능한지에 대한 부분에 대한 문제가 존재한다.
센서의 한계를 극복하고 안전을 보장하며 자율주행을 하기 위해서 통신 시스템과 연계해서 주행해야 도로의 상황이 차량에 제대로 주입이 되야 하나, 통신에 음영지역이 생겼을 때 차량을 어떻게 제어를 해야 되는지에 대한 테스트도 필요하다.
위와 같은 테스트를 통해 자율주행의 안전을 도모하겠다는 것이 KCL의 목표이며 이를 위해 묵계리 필지에 자율주행 테스트 베드 구축을 구상하고 있는 것이다.
현재 자율주행 기술은 커브길과 경사로에서의 객체 인식, 비포장도로에서 포장도로로 바뀌는 도로조건 등에서 제대로 제어가 가능한지에 대한 부분에 대한 문제가 존재한다.
센서의 한계를 극복하고 안전을 보장하며 자율주행을 하기 위해서 통신 시스템과 연계해서 주행해야 도로의 상황이 차량에 제대로 주입이 되야 하나, 통신에 음영지역이 생겼을 때 차량을 어떻게 제어를 해야 되는지에 대한 테스트도 필요하다.
위와 같은 테스트를 통해 자율주행의 안전을 도모하겠다는 것이 KCL의 목표이며 이를 위해 묵계리 필지에 자율주행 테스트 베드 구축을 구상하고 있는 것이다.
향후 자율주행 레벨4이 자리 잡으려면 도심로, 평지뿐만이 아닌 입체적인 도로와 굴곡진 도로에서 안전을 보장해야 하기에 시험도(道)가 필요하다.
박 선임은 “국내에 아직 입체적인 급격한 오르막, 내리막 경사 도로를 갖춘 자율주행 테스트 베드가 없다”며 “도로 중 70%가 산악 도로이기에 국내 환경에 적합한 테스트 베드가 필요하다”고 전했다.
박 선임은 “국내에 아직 입체적인 급격한 오르막, 내리막 경사 도로를 갖춘 자율주행 테스트 베드가 없다”며 “도로 중 70%가 산악 도로이기에 국내 환경에 적합한 테스트 베드가 필요하다”고 전했다.
KCL은 자율주행 시험 및 평가 시나리오 도출 및 평가 지원을 추진하는 것도 구상 중에 있다.
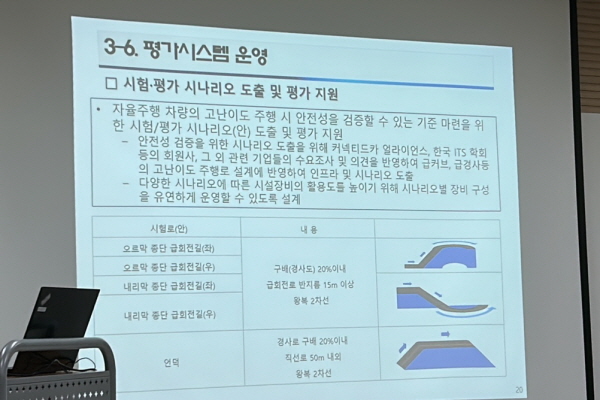
자율주행 차량의 고난도 주행 시 안전성을 검증할 수 있는 기준 마련을 위한 시험 및 평가 시나리오를 도출하고 평가를 지원한다는 계획이다.
안전성 검증을 위한 시나리오 도출을 위해 커넥티드카 얼라이언스, 한국ITS학회 등의 회원사와 기업들의 수요조사 및 의견을 반영해 급커브, 급경사 등의 주행로 설계에 반영하겠다는 의지를 내비쳤다.
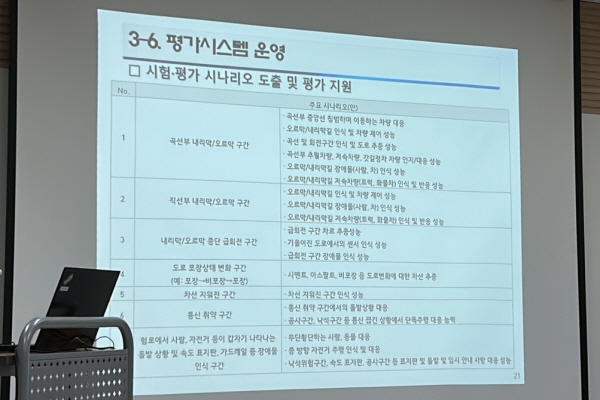
예를 들어 산악도로에서 운전을 하면 오르막길 곡선부에서 중앙선을 침범해 내려오는 차들이 있다.
이를 어떻게 대응할 것인지, 급회전 경사로 구간에서 차로를 얼만큼 추정할 수 있으며, 반경은 어느 정도인지 등에 대한 시나리오와 통신이 간헐적으로 끊길 때는 제어를 어떻게 할 것인지에 대한 시나리오 부여도 있어야 한다.
시골 같은 경우 무단횡단, 야생동물, 지워진 차선 등 시스템에 있어 위험한 요소가 상당히 많기 때문에 어떻게 인지하고 대응할 것인지에 대한 시나리오도 마찬가지다.
KCL은 위와 같은 시나리오를 횡성 테스트 베드에서 시험할 수 있도록 구축할 계획을 가지고 있어 지속적인 관심을 가져야 할 것으로 보인다.
박 선임의 발표가 끝난 뒤 김봉섭 지능형자동화부품진흥원 자율주행팀 팀장은 급격한 경사로 등을 시험할 수 있는 자율주행 테스트 베드의 필요성에 공감했고, 이어 “비포장도로에서의 자율주행의 경우 한화디펜스, 현대로템과 같이 무인 전술차를 개발하는 기업들이 도움이 될 수도 있을 것 같다”며 조언을 건넸다.
안전성 검증을 위한 시나리오 도출을 위해 커넥티드카 얼라이언스, 한국ITS학회 등의 회원사와 기업들의 수요조사 및 의견을 반영해 급커브, 급경사 등의 주행로 설계에 반영하겠다는 의지를 내비쳤다.
예를 들어 산악도로에서 운전을 하면 오르막길 곡선부에서 중앙선을 침범해 내려오는 차들이 있다.
이를 어떻게 대응할 것인지, 급회전 경사로 구간에서 차로를 얼만큼 추정할 수 있으며, 반경은 어느 정도인지 등에 대한 시나리오와 통신이 간헐적으로 끊길 때는 제어를 어떻게 할 것인지에 대한 시나리오 부여도 있어야 한다.
시골 같은 경우 무단횡단, 야생동물, 지워진 차선 등 시스템에 있어 위험한 요소가 상당히 많기 때문에 어떻게 인지하고 대응할 것인지에 대한 시나리오도 마찬가지다.
KCL은 위와 같은 시나리오를 횡성 테스트 베드에서 시험할 수 있도록 구축할 계획을 가지고 있어 지속적인 관심을 가져야 할 것으로 보인다.
박 선임의 발표가 끝난 뒤 김봉섭 지능형자동화부품진흥원 자율주행팀 팀장은 급격한 경사로 등을 시험할 수 있는 자율주행 테스트 베드의 필요성에 공감했고, 이어 “비포장도로에서의 자율주행의 경우 한화디펜스, 현대로템과 같이 무인 전술차를 개발하는 기업들이 도움이 될 수도 있을 것 같다”며 조언을 건넸다.

관련뉴스
-
.jpg)
韓, 2030년까지 수송부문 연간 온실가스 배출 3,700만톤 감축
김효은 외교부 기후변화대사가 한국이 목표로 하는 2018년 대비 2030년 온실가스 40% 감축을 위해 수송부문에서 2018년 대비 3,700만톤을 감축해야 하며 이를 달성하기 위한 정부의 정책과 목표를 공유했다.
2023-04-24 오후 12:28:11by 성유창 기자
-

[한국ITS학회 춘계학술대회]V2X·인프라·자율주행 등 스마트 모빌리티 기술 총망라
지능형교통체계, 스마트 모빌리티 분야 최대 학술 모임인 한국ITS학회의 춘계학술대회에서 각 분야 전문가들의 연구성과 발표와 토론이 진행됐다.
2023-04-24 오후 5:04:42by 성유창 기자
많이 본 뉴스
[열린보도원칙] 당 매체는 독자와 취재원 등 뉴스이용자의 권리 보장을 위해 반론이나 정정보도, 추후보도를 요청할 수 있는 창구를 열어두고 있음을 알려드립니다.
고충처리인 장은성 070-4699-5321 , news@e4ds.com